Overview
The project aims at creating a flexible and efficient python open-source software development kit (SDK) that enables the creation, customisation and building of digital twins of robotic systems. The SDK is valid for developing digital twins for Unmanned Aerial Vehicles (UAV) and Automated Guided Vehicles (AGVs). However, the SDK is designed to be easily extensible to other robotic systems. is validated for its success.
Through the use of a private dockerized cloud the synchronization of the physical and digital systems are made in optimal latency that allows for almost real time synchronization.
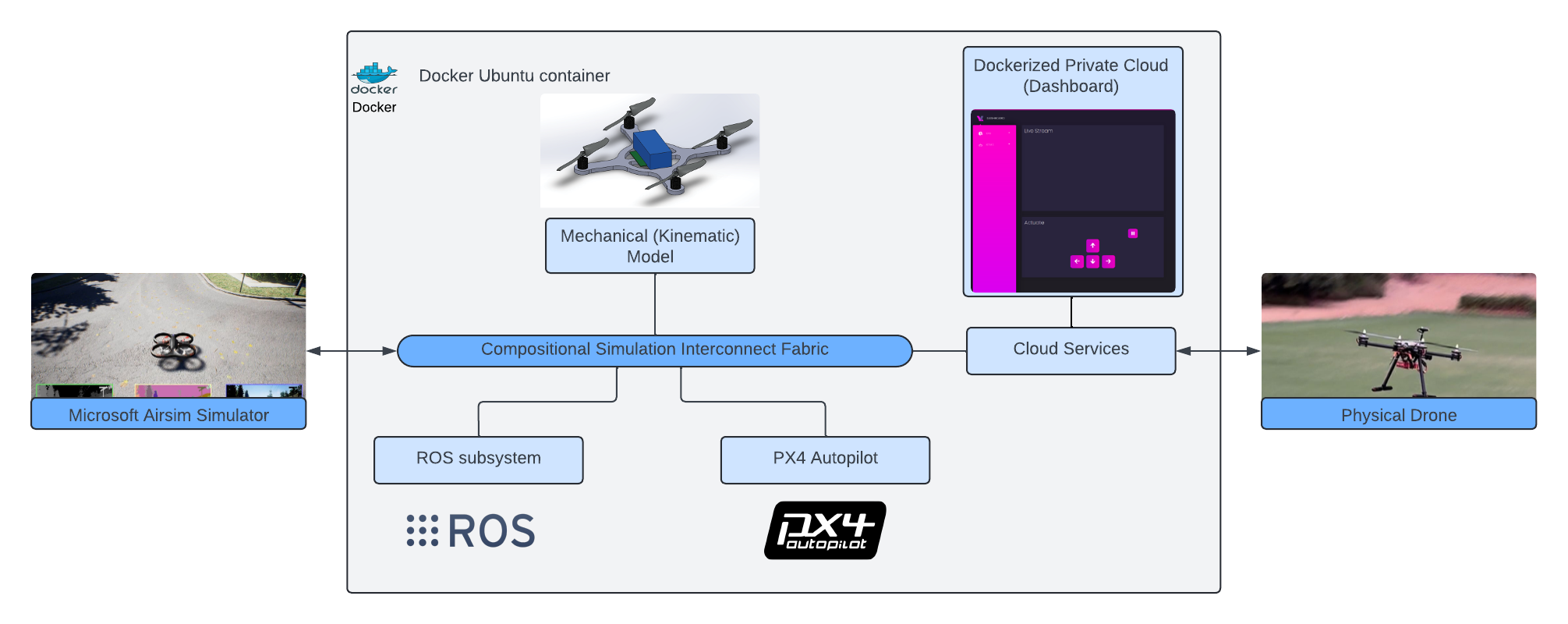
Flow Diagram of the Project